行車同步糾偏原理
本系統由上海精芬機電有限公司多年的運動控制經驗, 不斷加以改良設計出來的, 硬件采用國際上主流品牌 PLC, HMI, 高精度傳感器,變頻器,伺服機構等. 采用工業標準總線RS485/MODBUS RTU, CANOpen ,Profibus -dp,實現傳感器信號的高速可靠傳輸,使得整個控制系統實時性提高. 以及無線信號,應用與復雜的現場環境. 本系統可應用與: 行車同步糾偏,起重機同步糾偏,液壓油缸雙路同步糾偏控制,倉儲升降機械,升降料斗小車,鋼廠物料輸送小車 , 滿足用戶的不斷變化的個性化需求;
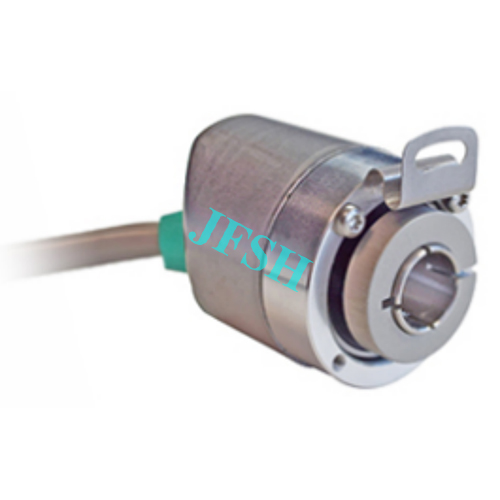
同步糾偏控制系統 ,采用倍恩絕對值編碼器檢測車輪位移(單位精確到mm), 廣泛應用與 工礦企業或工廠車間. 行車同步糾偏,起重機同步糾偏,液壓油缸雙路同步糾偏控制,長距離定位,多點定位,手動/自動快速切換操作, 易操控性,和高精度定位, 車輪傳感器可以安裝無線收發裝置,使得車輪移動軌跡在 二維坐標內 變得更加自由和靈活. 采用界面友好的 HMI (人機界面) 觸摸屏, 提供豐富的參數設置, 預留有系統I/O接口, 采用數字I/O, 和總線通訊, 可供用戶系統讀取位移運行數據. 以及向控制系統發送控制命令。
以下我們就行車、起重機同步糾偏控制做以下分析:
起重機由于車輪速度不一(如輪徑不同;傳動機構不同步;制動器松緊差異;車輪摩擦力變化等);兩條大車軌道水平差異超標;車體重心移動(小車位移;鉤頭擺動等);車輪組的安裝誤差等;在電動機受控相同的情況下,加之跨度長,運行距離遠等特點,使得起重機大車行走時,極易發生啃軌現象。既影起重機的穩定運行,又給生產工作帶來安全隱患。為解決啃軌問題,人們通常采用潤滑車輪輪緣和軌道側面,加裝水平輪,調整車輪安裝精度以及斷電糾偏等方法,不僅效果不理想,而且實施困難。考慮到由于早期行車采用二次電阻調速,我們研制了一套倍恩絕對值編碼器、ABS 制動器、顯示控制儀等為主要設備構成的起重機大車自動糾偏系統,并把這一研究設計成果應用在了起重機大車糾偏中。經過現場的調試和運行,這套系統能夠對起重機大車車身發生的偏斜進行自動的糾正,使啃軌現象得到消除,滿足了現場生產要求。
當起重機大車運行時,在沒有發生啃軌的情況下,安裝在大車兩側相對應的車輪組會同時運行在同一水平線上。即使他們之間存在著誤差,這個誤差也會是在允許范圍內而且始終保持不變。在這樣的情況下,車輪輪緣和軌道之間就不會產生擠壓。反之在大車運行時,兩側車輪組相對位置產生了偏差即行程差,那么這就會使行車車體相對于軌道發生偏斜,造成車輪輪緣與軌道之間發生擠壓形成啃軌。如果在兩側車輪組行程差大于允許值時,對兩側車輪轉速進行調節:降低相對位置超前一側車輪的轉速,提高相對位置在后一側車輪的轉速,或者保持一側車輪的轉速不變,提高或降低另一側車輪的轉速,使兩側車輪的行程差始終在允許的范圍內。這樣就可以有效的防止啃軌現象的發生。(本項目中采用保持相對位置在后一側電動機轉速不變,相對位置超前一側電動機進行單獨調節的方式進行糾偏)基于這種思想,我們在大車兩側從動輪上分別安裝了兩臺倍恩絕對值編碼器,用來檢測大車每一側車輪的行程值。兩側的電動機制動器分別由控制儀獨立進行控制。由控制儀采集倍恩絕對值編碼器讀數并控制兩側的行程差在一定的范圍內,控制儀內部設置兩個閥值點,當行程差大于行車跨度千分之三時,輸出信號進行糾偏,當行程差小于行車跨度千分之一時,糾偏停止,從而達到自動糾偏的目的。
在本項目中糾偏控制的行程差是車輪一側的行程值減去另一側的行程值的結果。一般行程差要控制在行車跨度的千分之一以內。當行程差小于行車跨度的千分之一時,則行車不需要糾偏;當行程差大于行車跨度的千分之一而小于行車跨度的千分之三時,則說明兩側車輪相對位置已經不在同一條直線上并超出了允許范圍,行車車體發生了偏斜,需要進行糾偏;當行程差大于行車跨度的千分之三時,則說明行車車體已經偏斜嚴重,需要停車進行糾偏。如行車大車輪的直徑是 800mm,行程 400m,整個行程大車車輪將旋轉400/(0.8×3.14)≈159 轉。為了防止車輪打滑給倍恩絕對值編碼器反饋數值造成的誤差,倍恩絕對值編碼器安裝在從動車輪處,并與車輪同軸。為了測量的精確,我們采用 8192 個脈沖的倍恩絕對值編碼器,這樣大車每旋轉一周運動的距離將被倍恩絕對值編碼器等分為 8192 份反饋,我們的測量精度將是 800*3.14/8192≈0.3mm,因此我們可以將大車車輪行程值的測量精度控制在 0.5mm 以內。在系統中,因為 S 行程差是通過兩側絕對值編碼器反饋數值作差的計算得出的,所以倍恩絕對值編碼器反饋數值的準確性決定著計算行程差的準確性,也決定著控制儀對糾偏程序是否執行判斷的準確性。在倍恩絕對值編碼器的工作運行中由于車輪存在打滑現象,所以編碼器計數值將是存在誤差的,并且是不可避免的,隨著大車運行距離的增大,該誤差將不斷累積,由于起重機大車的運行距離一般都很長,所以倍恩絕對值編碼器的累積誤差對系統控制的影響是不可忽略的。為此,我們控制儀設置了消除編碼器累積誤差的置零按鈕開關,從而達到消除編碼器累積誤差的目的。
在系統硬件組成中,我們采用兩臺倍恩絕對值編碼器分別測算大車兩側車輪相對位置。采用JFC-202絕對型通用雙路糾偏儀進行自動糾偏程序的控制。采用兩臺韓國 ABS 制動器分別控制兩側電動機。
控制儀部分圖片:


通過對現場實際運行情況的測量監控得出:
1.由倍恩絕對值編碼器測算出的兩側車輪相對于零點的位置值與實際測量值誤差小于0.5mm,測量精度達到了控制要求。
2.每隔 30 米感應開關正確觸發一次,編碼器校正程序執行一次。編碼器累積誤差得到有效的消除。
3.每一臺起重機在 400 多米的軌道上往返運行期間,每當行程差大于 0.04米時,糾偏程序都會自動執行糾偏程序。全過程糾偏次數一般在 10~18 次左右。
4.糾偏進行時和糾偏后的起重機大車運行穩定,糾偏投入的情況下車輪與軌道之間擠壓發出的聲響次數明顯減少。
5.糾偏系統的投入減輕了現場工作人員對大車車輪維護的工作負擔,延長了車輪的使用壽命,提高了行車運行的可靠性和穩定性。
具體要求及技術參數可以致電上海精芬機電有限公司技術部 TEL:021-39536219 FAX:021-39536217
行車同步糾偏示意圖
主軸 LA·
下行 上行
從軸
D3-D2-D1 LB D1 D2
注:LA:主輪位移值
LB:從輪位移值
D1:從輪超主輪的差值(一次左糾值)
D2:從輪超主輪的差值(二次左糾值)
-D1:主輪超從輪的差值(一次右糾值)
-D2:主輪超從輪的差值(二次右糾值)
D3:主從輪的差值(停機值)
·說明:(上行時)LA=LB:正常運行
LA-LB=D1 時:從軸減小頻率
LA-LB=-D1 時:主軸減小頻率
LA-LB=D2 時:從軸減小頻率
LA-LB=-D2 時:主軸減小頻率
當 LA 和 LB 的差值達到 D3 時,必需停機。
(下行時)LA=LB 時:正常運行
LA-LB=D1 時:主軸減小頻率
LA-LB=-D1 時:從軸減小頻率
LA-LB=D2 時:主軸減小頻率
LA-LB=-D2 時:從軸減小頻率
當 LA 和 LB 的差值達到 D3 時,必需停機
注:詳細資料請致電精芬機電技術部索取!

微
信
公
眾
號

地址:上海市嘉定區鶴旋路江橋萬達廣場4號商務樓11層
電話:+86-21-39536219/39536217
傳真:+86-21-39536217
技術直線電話:15021025598
客服直線電話:13391285926
網址:www.wmbbl.com
郵箱:shjingfen@163.com
郵編:201803